RevPi Connect S/SE
Product Description
The RevPi Connect S or RevPi Connect SE is a robust 24 V industrial PC for IIoT and automation projects based on the Raspberry Pi Compute Module 4S. The RevPi is a basic module from the Revolution Pi family. All devices in the Revolution Pi family are developed in accordance with EN 61131-2.
Components
Note: RevPi Connect S and RevPi Connect SE have the same structure.

| Position | Component | Application |
|---|---|---|
| 1 | X2 connector | Relay output, Digital input |
| 2 | 6 × status LED | LEDs |
| 3 | 2 × RJ45 Ethernet | Ethernet Interfaces, Establishing a Network Connection |
| 4 | Micro USB | Saving and Reinstalling the Image |
| 5 | 2× USB A | USB Interfaces |
| 6 | RS485 socket | Serial Devices (RS485) |
| 7 | X4 connector | Connecting the Power Supply, Watchdog |
| 8 | 2 × locking clip | Mounting the Device on a DIN Rail |
| 9 | Ventilation Slots | Mounting the Device on a DIN Rail |
| 10 | PiBridge | Connecting Expansion Modules |
| 11 | ConBridge | Connecting Expansion Modules |
| 12 | Micro HDMI | Set up Desktop Mode |
Compatible RevPi Image
- RevPi Bookworm Image
- RevPi Bullseye Image
- RevPi Buster Image
See: RevPi Images.
Variants
| Item No.: | RAM | eMMC | Compatible with RevPi gateways |
|---|---|---|---|
| 100362 | 1 GB | 8 GB | Yes |
| 100363 | 1 GB | 16 GB | Yes |
| 100364 | 1 GB | 32 GB | Yes |
| 100368 | 1 GB | 8 GB | No |
| 100369 | 1 GB | 16 GB | No |
| 100370 | 1 GB | 32 GB | No |
For available variants see Revolution Pi Shop.
Extension Modules
The RevPi Connect S or RevPi Connect SE base module can be expanded by up to 6 expansion modules to form a Revolution Pi system:
| Left side | base module | Right side |
|---|---|---|
| 5 × RevPi I/O module, of which 1 × RevPi Gateway | RevPi Connect S | 1× RevPi Con CAN,1× RevPi Con M-Bus |
| 5 × RevPi I/O module | RevPi Connect SE | 1× RevPi Con CAN,1× RevPi Con M-Bus |
Compatible I/O Modules
- RevPi DIO - Digital I/O expansion module
- RevPi DI - Digital input expansion module
- RevPi DO - Digital output expansion module
- RevPi AIO - Analog I/O expansion module
- RevPi MIO - Analog & digital I/O expansion module
- RevPi RO - Relay output expansion module
Compatible RevPi Con Modules
Compatible Gateways
RevPi gateways can only be connected to the far left of the system via a PiBridge connector. The RevPi gateways are not supported by the SE variants of the Revolution Pi family.
- RevPi Gate PROFINET
- RevPi Gate EtherNet/IP
- RevPi Gate EtherCAT
- RevPi Gate PROFIBUS
See RevPi Gateways
Virtual Devices
The Virtual Devices are delivered with the RevPi image as components in PiCtory included:
Scope of Delivery
The scope of delivery includes
- RevPi Connect S / RevPi Connect SE (base module)
- X4 connector with pre-wired Watchdog jumper
- X2 connector
- 2 × cover plug for PiBridge/ConBridge
- Supplement
Mounting and Connecting
The RevPi was developed for use in a control cabinet. Observe the specifications for the Intended Use and all Safety Instructions. Intended UseSafety Instructions
Danger to life due to electric shock
There is a risk of fatal electric shock when working on devices in the switch cabinet with 230 V mains voltage.
▷ Work in the switch cabinet may only be carried out by qualified electricians.
▷ Before carrying out any work in the switch cabinet, switch off the power supply properly.
Carry out the mounting and connection in the following order:
-
Mount the RevPi base module and all expansion modules on a DIN rail .
-
Connect all extension modules via PiBridge connector.
-
If necessary, connect the RevPi Con modules via ConBridge plug connector.
-
Connect all other devices such as sensors and actuators. The interfaces available to you for this can be found in the section Components.
-
Connect a monitor and a keyboard if you want to use the RevPi in the Desktop Mode want to operate. This is not necessary if you have a network connection to access the RevPi.
-
Finally, close the power supply.
The RevPi Gateways are not supported by the RevPi SE variants.
Connecting the UPS
A UPS (uninterruptible power supply) ensures that devices continue to function during a fault. Depending on the type of UPS, a UPS can protect against the following faults:
- Power failure
- Overvoltage
- Undervoltage
- Frequency changes
- Harmonics
The RevPi has a digital input, to which the status output of a UPS can be connected.
▷ Please check whether your UPS is suitable for connection to the RevPi.
▷ Connect the status output of the UPS to the digital input on the X2 connector (pin IN and pin ⫠).
▷ Observe the installation specifications of the UPS manufacturer.
▷ Test the UPS.
In the process image, bit 6 of the RevPiStatus variable is 0 or 1, depending on whether 0V or 24V is applied to the input. Your application must read this bit cyclically. If the UPS reports a problem, your application must initiate a corresponding measure. What exactly should be done depends on:
- the size of the battery used,
- the current consumption of the RevPi,
- the current consumption of all components that are additionally connected to the UPS.
Typically, the system is brought into a safe state and the RevPi is shut down.
Access to the Device
The RevPi is accessed in two steps:
Install all available Updates as soon as the RevPi is connected to the internet, so that the system is always up to date with security-relevant features.
Alternatively, access is possible without a network, see Desktop Mode.
See also:
Configuration
Basic Configuration
From the RevPi Bookworm image (10/2024) onwards, the basic configuration of the RevPi devices is carried out via the Cockpit web application.
Until the RevPi Bullseye Image (04/2024), the basic configuration of the RevPi devices is carried out via the RevPi Status web application.
System Configuration
The Revolution Pi system, i.e. a RevPi base module with expansion modules, is configured via the PiCtory web application.
Configuring the Base Module in PiCtory
▷ Start PiCtory.
▷ Select the RevPi base module from the Device Catalog and drag and drop it onto the empty slot with position number 0.
❯ The configurable values appear in the Value Editor.
▷ Save the configuration as the start configuration with File > Safe as Start-Config.
❯❯ The start configuration is called up directly after each boot process.
| Value | Function |
|---|---|
| INP RevPiStatus | Status of the piControl driver |
| INP RevPiIOCycle | Cycle time of piBridge communication between base module and expansion modules in ms |
| INP RS485ErrorCnt | Error counter for piBridge communication |
| INP Core_Temperature | CPU temperature |
| INP Core_Frequency | CPU frequency |
| OUT RevPiLED | Status byte for LEDs |
| OUT RS485ErrorLimit1 | First limit value for error counter > Message in kern.log |
| OUT RS485ErrorLimit2 | Second limit value for error counter > piBridge communication is stopped |
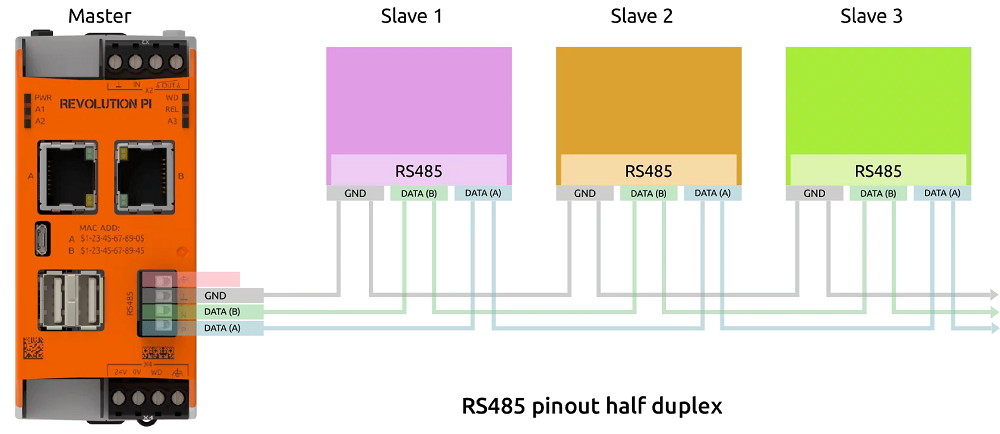
Serial Devices (RS485)
The RevPi has an RS485 interface to connect serial devices such as sensors.
The socket has differential data line terminals P/N and reference terminals (internal GND and functional earth via 1 MOhm RC network).
Under Linux, the interface can be addressed via the device driver node with :
/dev/ttyRS485
How you use this connection optimally depends on your project environment. The network you are working with or the EMC load are individual factors that influence how you assign this connector.
We are therefore unable to show you an optimal solution for your individual project, but we have compiled a list of the problems that can occur and tips on how you can solve them.
RS485 is a fully differential line and does not normally require a third GND line. However, due to the limits of the input receivers ("maximum common mode voltage"), there may be problems with the signal quality if no potential reference is used between the transmitter and receiver. However, connecting the internal GND to a line that is subject to EMC can lead to EMC problems within the RevPi Connect.
We therefore recommend that you use a common functional earth between all RS485 network participants. This gives you a good, common reference potential for the differential bus signal.
If this does not work either, you can connect the FE terminal of the RS485 connector to the third (GND) line of the bus.
You can also try to solve signal problems with the GND terminal.
Ethernet Interfaces
The RevPi can be connected to a network via the RJ45 interface.
Two 10/100 Ethernet connections are available on the RevPi, which are independent of each other. This allows the RevPi to be integrated into two different networks. The MAC addresses are printed on the front of the housing.
Under Linux, the interfaces can be addressed with:
- Socket A:
eth0 - Socket B:
eth1
USB Interfaces
The RevPi has two USB-A Interfaces. This allows USB 2.0 client devices such as USB hard disks, surf sticks, keyboards or mice to be connected. Both sockets together may be loaded with 1 A. How the current is distributed to both sockets is irrelevant. Z. For example, one socket can be loaded with 1 A and the other cannot be used. Or one socket is loaded with 300 mA and the other with 700 mA. For both connections together, 1 A must not be exceeded. If more than two USB-A ports are required, a USB hub can be connected.
LEDs
LED PWR
The PWR (Power) LED indicates the device status.
| Signal | Function |
|---|---|
| Green | Power supply is connected. |
| Red | There is a communication fault between connected modules. |
LED WD
The LED WD (watchdog) indicates the status of the watchdog.
| Signal | Function |
|---|---|
| Off | The watchdog is deactivated. |
| Green | The watchdog is activated and all system components are running correctly. |
| Flashes once red | The watchdog has detected an error and restarted the system. |
LED REL
The LED REL (relay) indicates the status of the relay.
| Signal | Function |
|---|---|
| Off | The relay contact is open. |
| Green | The relay contact is closed. |
LED A1 – A3
LEDs A1 to A3 are customizable.
The LEDs can be used for user-specific requirements such as indicating a network connection, indicating that a memory limit has been exceeded, monitoring a process and indicating faults.
The LEDs can be switched in the command line application piTest with the variable RevPiLED.
The RevPiLED output has a defined byte length and therefore has a certain number of bits that are read from right to left. Certain bit positions are each assigned to an LED. The LED is switched by setting the respective bits to 0 or 1.
| LED | Assigned bit position |
|---|---|
| A1 | 0 and 1 |
| A2 | 2 and 3 |
| A3 | 4 and 5 |
An LED signal is set in the command line with the command piTest -w RevPiLED,x where x corresponds to the decimal value calculated from the respective bit pattern.
| LED | Signal | Bit pattern | Decimal value |
|---|---|---|---|
| A1 – A3 | off | 0000 0000 | 0 |
| A1 | green | 0000 0001 | 1 |
| red | 0000 0010 | 2 | |
| orange | 0000 0011 | 3 | |
| A2 | green | 0000 0100 | 4 |
| red | 0000 1000 | 8 | |
| orange | 0000 1100 | 12 | |
| A3 | green | 0001 0000 | 16 |
| red | 0010 0000 | 32 | |
| orange | 0011 0000 | 48 |
To switch several LEDs simultaneously, the respective decimal values have to be added up.
Example: If LED A1 shall flash red and LED A2 green at the same time, the command is piTest -w RevPiLED,6 (bit pattern: 0000 0110 = decimal values 2+4).
If a signal is to be added to an existing LED circuit, the value for all required signals must be recalculated and rewritten.
Watchdog
The RevPi is equipped with a hardware watchdog.
A watchdog is a timer that restarts the RevPi after 60 seconds. To prevent this from happening, the watchdog must be reset regularly as long as the system is running without errors. In the event of an error, such as a crash of the application process, there is no reset and the watchdog triggers a restart of the RevPi.
Activating Watchdog
The RevPi is supplied with an X4 connector, which is already pre-wired. The jumper on terminals 6 and 7 deactivates the watchdog.
The watchdog is active without this cable and the watchdog timer must be restarted cyclically by your application software so that your system is not restarted. Until you have such software, it therefore makes sense to deactivate the watchdog. Otherwise it might disturb you during your development work.
▷ Remove the jumper cable between pin 0V and pin WD to activate the watchdog.
Monitoring the Connected Device
The relay output allows devices connected to the X2 connection to be monitored by the watchdog.
You can switch the relay output in the process image (RevPiLED, bit 6) bit by bit. You can also use this to set the relay to switch when the watchdog has reported an error, for example.
You can find an example script on the RevPi.
The file watchdog.sh can be found in the directory /etc/rc.local.
You can run the script by typing the following command in the command line:
/home/pi/connect/revpi-connect-watchdog.sh/>dev/null_&
This script is only an example and is not suitable for controlling watchdogs or relays. However, you can use it as a template to create your own command in an application program (e.g. logiRTS).
This is how you use the watchdog to restart the relay:
▷ Patch the FTDI EEPROM:devnum=$(cat /sys/bus/usb/devices/1-1.5.2/devnum)<br></br>sudo /home/pi/connect/patch_eeprom d:1/$devnum 0x14=0xaa 0x15=0x00
You no longer need to carry out this step if you have already used the watchdog to control the relay.
▷ Restart RevPi Connect:sudo reboot
▷ Enter one of the following commands to switch the relay on or off when the watchdog responds:
Switch on:
sudo /home/pi/connect/enable_relay_watchdog.py
Switch off:
sudo /home/pi/connect/disable_relay_watchdog.py
You must call up the desired command again after each reboot.
If you have entered this command, it is possible that the interface /dev/ttyRS485 disappears for a short time.
Relay output
The RevPi has a relay output on the X2 connector. This relay output can be used, for example, to interrupt the power supply to connected hardware.
- The relay can switch a maximum of 30 V and 300 mA.
- The relay contact is open after the start.
▷ Make sure that all devices are disconnected from their respective power supplies.
▷ Connect the load to be switched to the OUT pins on the X2 connector.
▷ Connect the power supply.
The relay output is defined in the process image via the status byte RevPiOutput, Bit 0.
Digital input
The RevPi has a digital input for a +24 V input signal on the X2 connector. The input has an internal pull-down resistor.
The digital input can be used to connect a UPS.
▷ Make sure that all devices are disconnected from their respective power supplies.
▷ Connect the signal transmitter to the IN+ and IN- pins of the X2 connector.
▷ Connect the power supply.