RevPi Connect 4
Produktbeschreibung
Der RevPi Connect 4 ein robuster 24-V-Industrie-PC für IIoT- und Automatisierungsprojekte auf Basis des Raspberry Pi Compute Module 4. Der RevPi ist ein Basismodul aus der Revolution Pi Familie. Alle Geräte der Revolution Pi Familie werden gemäß EN 61131-2 entwickelt.
Aufbau

| Position | Komponente | Verwendung |
|---|---|---|
| 1 | X2-Stecker RS485 | Serielle Geräte (RS485), USV anschließen |
| 2 | 6 × Status-LED | LEDs |
| 3 | 2 × RJ45 Ethernet | Ethernet-Schnittstellen, Netzwerkverbindung herstellen |
| 4 | 2 × USB A 3.2 Gen 1 | USB-Schnittstellen |
| 5 | RP-SMA-Buchse1 | WLAN und BT |
| 6 | Micro-USB | Image sichern und neu installieren |
| 7 | X2-Stecker | Relais-Ausgang, Digitaler Eingang |
| 8 | X4-Stecker | Spannungsversorgung anschließen |
| 9 | 2 × Arretierklammer | Gerät auf einer Hutschiene montieren |
| 10 | Lüftungsschlitze | Gerät auf einer Hutschiene montieren |
| 11 | 2 × PiBridge | Erweiterungsmodule anschließen |
| 12 | Micro-HDMI | Desktop-Betrieb einrichten |
1 nur bei den Varianten mit WLAN
Kompatible RevPi Images
- RevPi Bookworm Image
- RevPi Bullseye Image
Siehe RevPi Images.
Varianten
| Artikelnr. | RAM | eMMC | WLAN |
|---|---|---|---|
| 100376 | 2 GB | 8 GB | Nein |
| 100377 | 2 GB | 8 GB | Ja |
| 100378 | 4 GB | 32 GB | Nein |
| 100379 | 4 GB | 32 GB | Ja |
| 100395 | 8 GB | 32 GB | Nein |
| 100380 | 8 GB | 32 GB | Ja |
Verfügbare Varianten siehe Revolution Pi Shop.
Erweiterungsmodule
Das Basismodul RevPi Connect 4 kann um bis zu 10 Erweiterungsmodule zu einem Revolution Pi System erweitert werden:
| Linke Seite | Basismodul | Rechte Seite |
|---|---|---|
| 5 × RevPi I/O-Modul | RevPi Connect 4 | 5 × RevPi I/O-Modul |
Kompatible I/O-Module
- RevPi DIO – Digitales I/O-Erweiterungsmodul
- RevPi DI – Digitales Input-Erweiterungsmodul
- RevPi DO – Digitales Output-Erweiterungsmodul
- RevPi AIO – Analoges I/O-Erweiterungsmodul
- RevPi MIO – Analoges & Digitales I/O-Erweiterungsmodul
- RevPi RO – Relais-Output-Erweiterungsmodul
Virtual Devices
Die Virtual Devices sind bei der Auslieferung mit dem RevPi Image als Komponenten in PiCtory enthalten:
Lieferumfang
Im Lieferumfang enthalten sind
- RevPi Connect 4 (Basismodul)
- X4-Stecker
- 2 × X2-Stecker
- 2 × Abschlussstecker für PiBridge
- Beiblatt
Montage und Anschluss
Der RevPi wurde für den Einsatz in einem Schaltschrank entwickelt. Beachte die Vorgaben für den bestimmungsgemäßen Gebrauch und alle Sicherheitshinweise. Bestimmungsgemäßer GebrauchSicherheitshinweise
Lebensgefahr durch elektrischen Schlag
Bei Arbeiten an Geräten im Schaltschrank unter Beteiligung von 230-V-Netzspannung besteht tödliche Stromschlaggefahr.
▷ Arbeiten im Schaltschrank nur von Elektrofachkräften durchführen lassen.
▷ Vor allen Arbeiten im Schaltschrank die Spannungsversorgung ordnungsgemäß abschalten.
Führe die Montage und den Anschluss in folgender Reihenfolge aus:
-
Montiere das RevPi Basismodul und alle Erweiterungsmodule auf einer Hutschiene.
-
Schließe alle Erweiterungsmodule über PiBridge-Steckverbinder an.
-
Schließe alle sonstigen Geräte wie Sensoren und Aktoren an. Die Schnittstellen, die Dir dafür zur Verfügung stehen, findest Du im Abschnitt Aufbau.
-
Schließe einen Bildschirm und eine Tastatur an, wenn Du den RevPi im Desktop-Betrieb betreiben möchtest. Das ist nicht notwendig, wenn Du über eine Netzwerkverbindung auf den RevPi zugreifen kannst.
-
Schließe zuletzt die Spannungsversorgung an.
USV anschließen
Eine USV (Unterbrechungsfreie Stromversorgung) stellt sicher, dass Geräte während einer Störung weiter funktionieren. Je nach Art der USV, kann eine USV vor folgenden Störungen schützen:
- Stromausfall
- Überspannung
- Unterspannung
- Frequenzänderungen
- Oberschwingungen
Der RevPi verfügt über einen digitalen Eingang, an dem der Statusausgang einer USV angeschlossen werden kann.
▷ Bitte prüfe, ob Deine USV geeignet ist, um sie an den RevPi anzuschließen.
▷ Verbinde den Statusausgang der USV mit dem digitalen Eingang am X2-Stecker (Pin IN und Pin ⫠).
▷ Beachte die Installationsvorgaben des USV-Herstellers.
▷ Teste die USV.
Im Prozessabbild steht in Bit 6 der Variable RevPiStatus 0 oder 1, je nachdem ob 0V oder 24V an den Eingang angelegt sind. Deine Applikation muss dieses Bit zyklisch auslesen. Falls die USV ein Problem meldet, muss Deine Applikation eine entsprechende Maßnahme einleiten. Was genau gemacht werden soll, ist abhängig von:
- der Größe der verwendeten Batterie,
- der Stromaufnahme des RevPi,
- der Stromaufnahme aller Komponenten, die zusätzlich an die USV angeschlossen sind.
Typischerweise wird die Anlage in einen sicheren Zustand gebracht und der RevPi heruntergefahren.
Zugriff auf das Gerät
Der Zugriff auf den RevPi erfolgt in zwei Schritten:
Installiere alle verfügbaren Updates, sobald der RevPi mit dem Internet verbunden ist, damit das System bei sicherheitsrelevanten Features immer auf dem aktuellen Stand ist.
Alternativ ist der Zugriff ohne Netzwerk möglich, siehe Desktop-Betrieb einrichten.
Siehe auch:
Konfiguration
Basiskonfiguration
Ab dem RevPi Bookworm Image (10/2024) erfolgt die Basiskonfiguration der RevPi Geräte über die Web-Applikation Cockpit.
Bis zum RevPi Bullseye Image (04/2024) erfolgt die Basiskonfiguration der RevPi Geräte über die Web-Applikation RevPi Status.
Systemkonfiguration
Die Konfiguration des Revolution Pi Systems, also eines RevPi Basismoduls mit Erweiterungsmodulen, erfolgt über die Web-Applikation PiCtory.
Basismodul in PiCtory konfigurieren
▷ Starte PiCtory.
▷ RevPi Basismodul aus dem Device Catalog wählen und per Drag-and-Drop auf den leeren Slot mit der Positionsnummer 0 ziehen.
❯ Im Value Editor erscheinen die konfigurierbaren Werte.
▷ Mit File > Safe as Start-Config. die Konfiguration als Startkonfiguration speichern.
❯❯ Die Startkonfiguration wird direkt nach jedem Boot-Vorgang aufgerufen.
| Value | Bedeutung |
|---|---|
| INP RevPiStatus | Status des piControl-Treibers |
| INP RevPiIOCycle | Zykluszeit der piBridge-Kommunikation zwischen Basismodul und Erweiterungsmodulen in ms |
| INP RS485ErrorCnt | Fehlerzähler für piBridge-Kommunikation |
| INP Core_Temperature | CPU-Temperatur |
| INP Core_Frequency | CPU-Frequenz |
| OUT RevPiOutput | Ausgangswert für Relaiskontakt |
| OUT RS485ErrorLimit1 | Erster Grenzwert für Fehlerzähler > Meldung in kern.log |
| OUT RS485ErrorLimit2 | Zweiter Grenzwert für Fehlerzähler > piBridge-Kommunikation wird gestoppt |
| OUT RevPiLED | Statusbyte für LEDs |
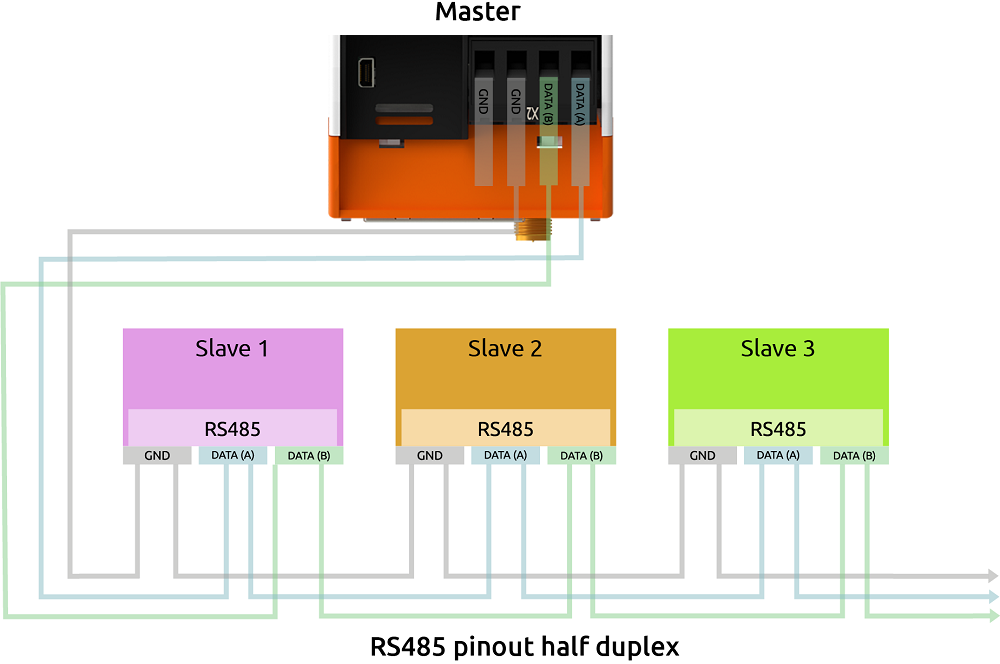
Serielle Geräte (RS485)
Der RevPi verfügt über eine RS485-Schnittstelle am oberen X2-Stecker, um serielle Geräte wie Sensoren anzuschließen.
Die Buchse hat differentielle Datenleitungsklemmen P/N und Referenzklemmen (interne GND und Funktionserde über 1 MOhm RC-Netzwerk).
Unter Linux lässt sich die Schnittstelle über den Device Driver Node ansprechen mit:
/dev/ttyRS485
Wie Du diesen Anschluss optimal verwendest, ist von Deiner Projektumgebung abhängig. Das Netzwerk, mit dem Du arbeitest oder die EMV-Belastung sind individuelle Faktoren, die Einfluss darauf haben, wie Du diesen Stecker belegst.
Wir können Dir deshalb keinen optimalen Lösungsweg für Dein individuelles Projekt zeigen, aber wir haben Dir die Probleme zusammengestellt, die auftreten können, und Tipps, wie Du sie beheben kannst.
RS485 ist eine voll differentielle Leitung und benötigt normalerweise keine dritte GND-Leitung. Aufgrund der Grenzen der Eingangsempfänger („maximale Gleichtaktspannung“) kann es jedoch zu Problemen mit der Signalqualität kommen, wenn kein Potentialbezug zwischen Sender und Empfänger verwendet wird. Durch den Anschluss des internen GND an eine Leitung, die durch EMV belastet ist, kann es jedoch wiederum zu EMV-Problemen innerhalb des RevPi Connect kommen.
Deshalb empfehlen wir Dir, eine gemeinsame Funktionserde zwischen allen RS485-Netzwerkteilnehmern zu verwenden. Dadurch erreichst Du ein gutes, gemeinsames Bezugspotential für das differentielle Bussignal.
Wenn das auch nicht funktioniert, kannst Du die FE-Klemme des RS485-Steckers mit der dritten (GND-)Leitung des Busses verbinden.
Du kannst außerdem versuchen, mit der GND-Klemme Signalprobleme zu lösen.
Ethernet-Schnittstellen
Über die RJ45-Schnittstelle kann der RevPi mit einem Netzwerk verbunden werden.
Am RevPi stehen zwei 10/100-Ethernet-Anschlüsse zur Verfügung, die voneinander unabhängig sind. Damit kann der RevPi in zwei unterschiedliche Netze eingebunden werden. Die MAC-Adressen sind auf der Vorderseite des Gehäuses aufgedruckt.
Unter Linux lassen sich die Schnittstellen ansprechen mit:
- Buchse A:
eth0 - Buchse B:
eth1
WLAN und BT
Voraussetzungen
✓ RevPi Basismodul mit WLAN-Schnittstelle
✓ DHCP-fähiger WLAN-Router
✓ Optional: externe RP-SMA-WLAN-Antenne
Die WLAN-Schnittstelle arbeitet mit 2,4 und 5 GHz und entspricht der IEEE802.11a/b/g/n/ac Spezifikation.
Unter Linux kannst Du, sofern keine anderen WLAN-Geräte verwendet werden, die WLAN-Schnittstelle ansprechen mit:
wlan0
WLAN über RevPi Status aktivieren
▷ Starte RevPi Status.
▷ Im Reiter CONFIG die Option Enable/Disable build-in WLAN aktivieren.
WLAN-Ländercode über raspi-config einrichten
Die Vorschriften und Frequenzbereiche für WLAN-Netzwerke sind für jedes Land unterschiedlich. Konfiguriere den WLAN-Ländercode, damit der RevPi nicht in verbotenen Bereichen sendet oder Interferenzen verursacht.
▷ Logge Dich über ein Terminal am RevPi ein.
▷ Öffne raspi-config mit dem Befehl:sudo raspi-config
▷ Navigiere über die Pfeiltasten ins Menü Localisation Options.
▷ Wähle die Option WLAN Country.
▷ Wähle das passende Land aus der Länderliste und bestätige mit ENTER.
❯❯ Der WLAN-Ländercode ist aktiv.
WLAN-Verbindung über NetworkManager einrichten
Die WLAN-Verbindung wird über den NetworkManager nmtui eingerichtet. Der NetworkManager ist ein terminalbasiertes Benutzerinterface zur Verwaltung von Netzwerkverbindungen unter Linux.
▷ Logge Dich über ein Terminal am RevPi ein.
▷ Starte nmtui mit dem Befehlsudo nmtui
❯❯ Das Benutzerinterface von nmtui erscheint.
Die Navigation innerhalb nmtui erfolgt über die Pfeil- und ENTER-Tasten.
▷ Wähle Edit a connection.
▷ Wähle das passende Wi-Fi-Netzwerk.
▷ Gib unter Password das WLAN-Password ein und konfiguriere ggf. weitere WLAN-Einstellungen.
▷ Speichere die Einstellungen mit OK und kehre mit *Back *auf die Startansicht zurück.
▷ Wähle Activate a connection.
▷ Wähle das Wi-Fi-Netzwerk und aktiviere die Verbindung mit der ENTER-Taste.
❯ Die Statusmeldung Connecting … erscheint.
❯ Die WLAN-Verbindung wird aufgebaut.
BT-Schnittstelle einrichten
Über die gleiche SMA-Buchse wie für die WLAN-Schnittstelle steht Dir auch eine BT‑Schnittstelle vom Standard 5.0 zur Verfügung.
▷ Logge Dich über ein Terminal am RevPi ein.
▷ Aktiviere die HCI-Schnittstelle mit dem Befehl:sudo systemctl enable hciuart
▷ Starte den Dienst hciuart mit dem Befehl:sudo systemctl start hciuart
▷ Starte den BT-Daemon mit:sudo systemctl start bluetooth
Siehe auch:
USB-Schnittstellen
Der RevPi verfügt über zwei USB-A-Schnittstellen. Damit können USB-2.0-Client-Geräte wie USB-Festplatten, Surfsticks, Tastatur oder Maus angeschlossen werden. Beide Buchsen zusammen dürfen mit 1 A belastet werden. Wie der Strom auf beide Buchsen verteilt wird, spielt dabei keine Rolle. Z. B. kann eine Buchse mit 1 A belastet und die andere nicht verwendet werden. Oder eine Buchse wird mit 300 mA und die andere mit 700 mA belastet. Für beide Anschlüsse zusammen darf 1 A nicht überschritten werden. Falls mehr als zwei USB-A-Anschlüsse benötigt werden, kann ein USB-Hub angeschlossen werden.
LEDs
LED PWR
Die LED PWR (Power) zeigt den Gerätestatus an.
| Signal | Bedeutung |
|---|---|
| Grün | Spannungsversorgung ist angeschlossen. |
| Rot | Es liegt eine Störung der Kommunikation zwischen angeschlossenen Modulen vor. |
LED A1 – A5
Die LEDs A1 bis A5 sind frei verwendbar.
Die LEDs können für anwenderspezifische Anforderungen verwendet werden wie z. B. eine Netzwerkverbindung anzeigen, Überschreiten eines Speicherlimits anzeigen, einen Prozess überwachen und Störungen anzeigen.
Die LEDs können in der Kommadozeilen-Applikation piTest mit der Variablen RevPiLED geschaltet werden.
Der Ausgang RevPiLED hat eine definierte Bytelänge und verfügt somit über eine bestimmte Anzahl von Bits, die von rechts nach links gelesen werden. Bestimmte Bitpositionen sind jeweils einer LED zugeordnet. Die LED wird geschaltet, indem die jeweiligen Bits auf 0 oder 1 gesetzt werden.
| LED | Zugeordnete Bitposition |
|---|---|
| A1 | 0 bis 2 |
| A2 | 3 bis 5 |
| A3 | 6 bis 8 |
| A4 | 9 bis 11 |
| A5 | 12 bis 15 |
Ein LED-Signal wird in der Kommandozeile mit dem Kommando piTest -w RevPiLED,x geschaltet, wobei x dem aus dem jeweiligen Bitmuster errechneten Dezimalwert entspricht.
| LED | Signal | Bitmuster | Dezimalwert |
|---|---|---|---|
| A1 – A5 | aus | 0000 0000 0000 0000 | 0 |
| A1 | rot | 0000 0000 0000 0001 | 1 |
| grün | 0000 0000 0000 0010 | 2 | |
| blau | 0000 0000 0000 0100 | 4 | |
| orange | 0000 0000 0000 0011 | 3 | |
| cyan | 0000 0000 0000 0110 | 6 | |
| magenta | 0000 0000 0000 0101 | 5 | |
| weiß | 0000 0000 0000 0111 | 7 | |
| A2 | rot | 0000 0000 0000 1000 | 8 |
| grün | 0000 0000 0001 0000 | 16 | |
| blau | 0000 0000 0010 0000 | 32 | |
| orange | 0000 0000 0001 1000 | 24 | |
| cyan | 0000 0000 0011 0000 | 48 | |
| magenta | 0000 0000 0010 1000 | 40 | |
| weiß | 0000 0000 0011 1000 | 56 | |
| A3 | rot | 0000 0000 0100 0000 | 64 |
| grün | 0000 0000 1000 0000 | 128 | |
| blau | 0000 0001 0000 0000 | 256 | |
| orange | 0000 0000 1100 0000 | 192 | |
| cyan | 0000 0001 1000 0000 | 384 | |
| magenta | 0000 0001 0100 0000 | 320 | |
| weiß | 0000 0001 1100 0000 | 448 | |
| A4 | rot | 0000 0010 0000 0000 | 512 |
| grün | 0000 0100 0000 0000 | 1024 | |
| blau | 0000 1000 0000 0000 | 2048 | |
| orange | 0000 0110 0000 0000 | 1536 | |
| cyan | 0000 1100 0000 0000 | 3072 | |
| magenta | 0000 1010 0000 0000 | 2560 | |
| weiß | 0000 1110 0000 0000 | 3584 | |
| A5 | rot | 0001 0000 0000 0000 | 4096 |
| grün | 0010 0000 0000 0000 | 8192 | |
| blau | 0100 0000 0000 0000 | 16 384 | |
| orange | 0011 0000 0000 0000 | 12 288 | |
| cyan | 0110 0000 0000 0000 | 24 576 | |
| magenta | 0101 0000 0000 0000 | 20 480 | |
| weiß | 0111 0000 0000 0000 | 28 672 |
Um mehrere LEDs gleichzeitig zu schalten, werden die jeweiligen Dezimalwerte addiert.
Beispiel: Wenn gleichzeitig die LED A1 rot und die LED A2 grün leuchten soll, lautet das Kommando piTest -w RevPiLED,17 (Bitmuster: 0001 0001 = Dezimalwerte 1+16).
Wenn einer bestehenden LED-Schaltung ein Signal hinzugefügt werden soll, muss der Wert für alle gewünschten Signale neu berechnet und geschrieben werden.
Watchdog
Ein Watchdog ist eine Zeitschaltuhr, die nach 60 Sekunden den RevPi neu startet. Damit dies nicht passiert, muss der Watchdog regelmäßig zurückgesetzt werden, solange das System fehlerfrei läuft. Bei einem Fehler, wie einem Absturz des Applikationsprozesses, erfolgt kein Zurücksetzen, und der Watchdog löst einen Neustart des RevPi aus.
Der RevPi verfügt über zwei unabhängige Watchdogs. Es gibt verschiedene Möglichkeiten, einen Watchdog unter Linux zu verwenden. Das RevPi Image und Raspbian Pi setzen auf den Systemmanager systemd.
Integrierter Watchdog
Der auf dem Prozessor integrierte Watchdog verhält sich wie andere Watchdogs unter Linux und ist ansprechbar mit:
/dev/watchdog0/dev/watchdog(als Standard-Watchdog)
Externer Watchdog
Ein zweiter Watchdog ist über den RTC-Baustein verfügbar und unter Linux ansprechbar mit:
/dev/watchdog1
Siehe auch:
Relais-Ausgang
Der RevPi verfügt über einen Relais-Ausgang am unteren X2-Stecker. Dieser Relais-Ausgang kann verwendet werden, um z. B. die Stromversorgung einer angeschlossenen Hardware zu unterbrechen.
- Das Relais kann maximal 30 V und 300 mA schalten.
- Der Relaiskontakt ist nach dem Start geöffnet.
▷ Stelle sicher, dass alle Geräte von ihrer jeweiligen Spannungsversorgung getrennt sind.
▷ Schließe die zu schaltende Last an die wie Pins OUT am X2-Stecker an.
▷ Schließe die Spannungsversorgung an. Der Relais-Ausgang wird im Prozessabbild über das Status-ByteRevPiOutput, Bit 0 gesteuert.
Digitaler Eingang
Der RevPi verfügt am unteren X2-Stecker über einen digitalen Eingang für ein +24 V-Eingangssignal. Der Eingang verfügt über einen internen Pull-Down-Widerstand.
Der digitale Eingang kann für den Anschluss einer USV verwendet werden.
▷ Stelle sicher, dass alle Geräte von ihrer jeweiligen Spannungsversorgung getrennt sind.
▷ Schließe den Signalgeber an die Pins IN+ und IN- des X2-Steckers an.
▷ Schließe die Spannungsversorgung an.